ゼットエムピーは、二足歩行ロボット『e-nuvo WALK ver.3 SDK 2011』を発表した。
2007年から販売を開始し、大学等教育機関での実習教育や、人工知能、自律移動ロボット、ヒューマンインタフェースといった研究で活用されているe-nuvo WALK ver.3をベースに、シミュレーションの様子を可視化する「ダッシュボード」と、自由な歩行を実現する「モーションランチャー」を追加した。
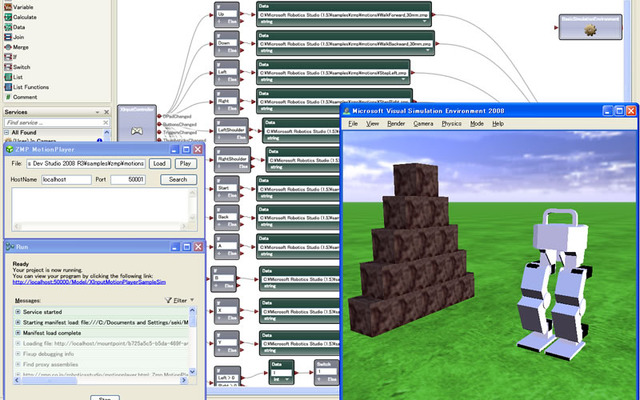
ダッシュボードは、シミュレーション環境のバーチャルロボットの各関節について関節角度の目標値とシミュレーション結果の差異がグラフィカルに確認できる。開発したアルゴリズムやモーションをシミュレーションで事前に検証できる。
モーションランチャーの搭載で、実際のリアルロボット、シミュレーション上のバーチャルロボット共に、歩行時の歩幅と旋回角を任意に変更できる。自律移動などのアルゴリズムを実装する際のロボットの動作の自由度が高まった。
また、マイクロソフトのロボティクス・デベロッパー・ステュディオ(RDS)の最新バージョンにも対応した。開発環境の強化でシミュレーションロボットと実ロボットの挙動の比較が行いやすくなり、実習やアルゴリズム検証などが進めやすくなった。
価格は60万6000円で、5月24日から受注を開始した。



