日本の地図ベンダー最大手のゼンリンは、フランス/ボルドー市で開催中の「ITS世界会議2015」に出展。自動走行システムを実現するための超高精度地図ソリューション「ZGM Auto(ZENRIN Geospatial data Model for Automotive)」の紹介と、自動走行向け地図データを展示した。
この「ZGM Auto」は、ゼンリンが研究開発を行ってきた自動走行システム実現に貢献するための新たな地図ソリューション。構造化した各種道路ネットワークデータ「ZGM NW for Horizon」と、3次元高精度空間データベース「ZGM HD for Sensing」の2つの地図データで構成される。これにより、自動走行システムの実現に向けて官民協調で開発が進められている「ダイナミックマップ」への貢献を目指す。
「ダイナミックマップ」とは、車両間の通信や車両と道路インフラとの通信を駆使して、広範囲の情報を取得しながら自動走行に役立てる“協調型”サービスの提供を目的とした基盤技術。道路や建物などの静的情報を載せた地図に、周辺の車両の位置情報や渋滞情報などの動的情報を重ね合わせて利用する。“cm”級の高精度さが最大のウリで、自動運転の実現にはこのダイナミックマップの開発と国際標準化が欠かせない。現在は各国がその分野で開発を競い合っている最中だ。
日本では、政府が自動走行(自動運転)を含む新たな交通システムを「SIP(戦略的イノベーション創造プログラム)」として位置付け、東京オリンピック・パラリンピックが開催される2020年の実現を目指している。ゼンリンは「ZGM Auto」をその一環としてこのデータを開発したというわけだ。
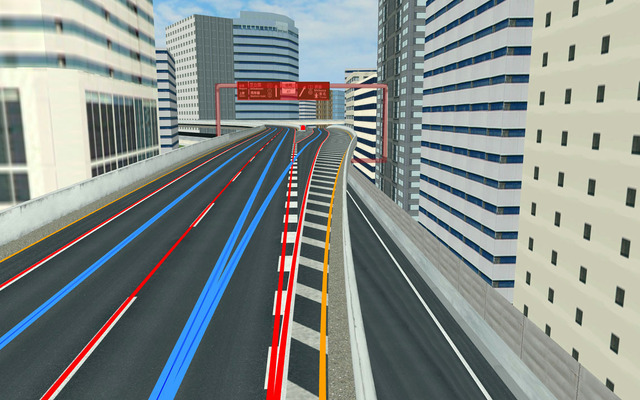
ゼンリンが今回のデモのために作成した地図データは、東京都内の首都高速・霞ヶ関ランプ~谷町ジャンクション~芝公園ランプへつながるルート。道路ネットワークや標識など地物の置き方などがダイナミックマップの超高精度な状態で反映されており、このデータをON/OFFすることでその反映状況が逐一分かるようになっていた。展示会場では来場者が途切れることは一切ない様子で、会場での「ZGM Auto」への関心の高さが窺えた。
ゼンリンは今後、完成させたデータ「ZGM Auto」について、自動走行システムの実現に向けた具体的な運用や反映方法について検討を進めていく。