NTTドコモは、総務省から「2016年度情報通信技術の研究開発『自律型モビリティシステム(自動走行技術、自動制御技術)の開発・実証』」の委託先に決定したと発表した。
今回、ドコモはパスコとともに、自律型モビリティシステムを開発・実証する4つの研究開発課題のうち、課題III「高度地図データベースの高効率なリアルタイム更新・配信技術の確立」の委託先に選定された。
パスコは主に自動走行に必要な高度地図データベース(ダイナミックマップ)の更新技術を開発し、ドコモは自動走行車へのダイナミックマップの効率的な配信技術を開発する。
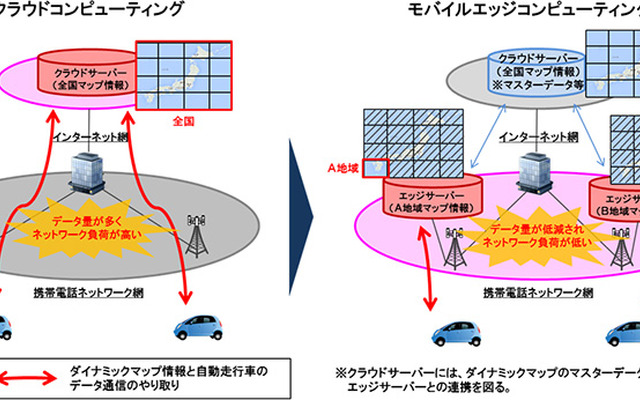
ドコモが開発する技術は、自動走行車へのマップ情報配信に携帯電話のネットワークを活用することを想定したもの。自動走行実現には、高精度で交通情報の状況に応じて変動する情報を統合した膨大なデータ量となるダイナミックマップを、高速移動する自動走行車に確実に配信する必要がある。自動走行車の普及に伴い、配信する携帯電話ネットワークへの高負荷が予想されるため、より効率的な配信技術が求められている。
ドコモは、今回の開発・実証では、エッジコンピューティングの技術を使ってダイナミックマップのサーバーを携帯電話のネットワークに分散して配置することで、リアルタイムに変化する渋滞情報や事故情報などを含む大容量なマップ情報を、地域ごとに分割した低容量のマップ情報として配信するモバイルエッジコンピューティング環境を構築する。
モバイルエッジコンピューティング環境の構築では、総務省研究開発課題II「自律型モビリティシステムの高精度化に係る技術の確立」の一部を担当するNTT未来ねっと研究所と連携して進める。研究開発期間は2016年度から2018年度まで。
他の課題と連携して、今回の研究で検討した技術が想定どおりに機能することを確認するため、横須賀リサーチパークに検証環境を構築し、実証実験を実施する予定。