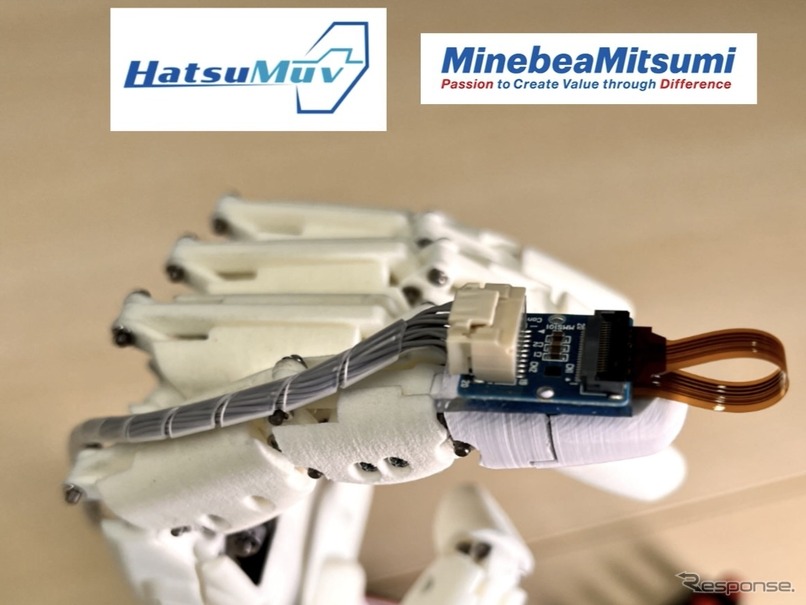






ミネベアミツミの小型6軸力覚センサー「MMS101」を組み込んだ、HatsuMuvのロボットハンド「HatsuHand」の実験的なテストを実施、HatsuHandの操作とセンサー反応が確認された。HatsuMuvが5月7日に明らかにした。今後のHatsuHandの活用可能性が期待される。
実験では、MMS101センサーをHatsuHandの人差し指に組み込み、センサーの取り付け過程とその動作を詳細にテストした。センサーの組み込み後、HatsuHandの動作を把持・接触の複数のケースでテストした。
HatsuHandが物体を把持した際に、加わる力に応じた変化をMMS101センサーがリアルタイムで測定し、測定結果は、評価用アプリ「ForceSensorEvaluationProgram」を通じてリアルタイムでモニターに可視化された。




