



NTTは11月11日、ドライブレコーダ等の車載カメラで撮影した画像から、画像内のインフラ設備位置を特定する技術を確立したと発表した。
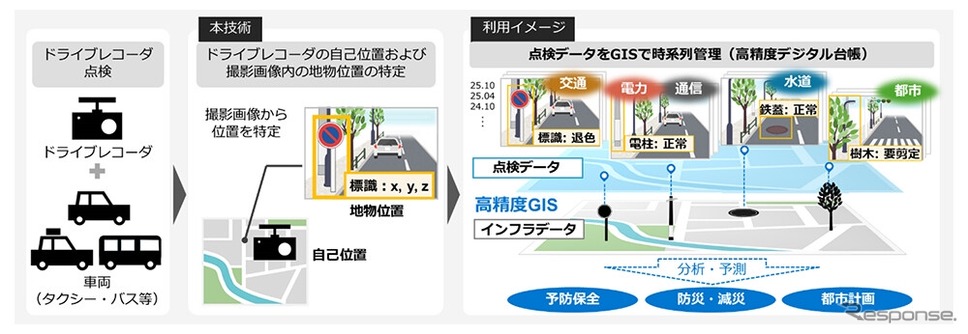
従来の作業員による現地点検の削減と、紙台帳に変わる高精度なデジタル台帳の整備をめざし、ドライブレコーダ点検画像内のインフラ設備の位置を高精度に特定する技術を開発した。
本技術では、画像から3次元シーンを再現する技術(3次元再構成技術)を用いて、ドライブレコーダ画像から3Dデータを生成することで、画像内のあらゆる地物について高精度な位置特定を可能とする。
社会インフラの老朽化および維持管理に携わる作業員不足は深刻であり、維持管理業務の抜本的効率化は急務となっている。特に、膨大な設備の安全を確保する点検業務のDXは、最優先課題の一つである。
AIの進歩により点検画像から劣化の検出・診断が可能となったことで、現地に赴く必要のないドライブレコーダを用いた点検・デジタル台帳作成が現場導入されつつある。しかし、ドライブレコーダ画像と共に得られるGPS等の位置情報は1~10メートル程度の誤差を含んでおり、点検の度に位置情報にずれが生じるという問題があった。
既存の位置推定手法として、「点検画像」と「参照画像(撮影時のカメラの自己位置既知の画像)」の特徴マッチングを行い、カメラの自己位置を推定した上で、画像内のインフラ設備の位置を算出する手法がある。この手法では、点検画像の風景に特徴がある場合は、特徴点をマッチングすることで自己位置を推定し、インフラ設備の位置を特定することができる。しかし、点検画像が風景特徴に乏しい場合は、誤マッチングが生じることで自己位置を推定できず、インフラ設備の位置を特定できないことがある。
既存の位置推定技術は、点検画像1枚に写る範囲の風景特徴のみを手がかりとしていたが、本技術では、一連の画像から3Dデータを生成し、点検画像1枚よりも広い範囲の風景特徴を手がかりとすることで、風景特徴に乏しい場所でも高精度な位置特定を可能とした。
具体的には、予め3次元再構成技術を用いて、高精度な位置情報を有する「参照3Dデータ」を用意しておき、点検画像を含む一連のドライブレコーダ画像からも同様に「点検3Dデータ」を作成する。そして、2つの3Dデータを重ね合わせることで、点検3Dデータ全体に参照3Dデータの高精度な位置情報を対応づけ、点検画像のカメラの自己位置および画像内のインフラ設備位置を特定する。
地物がまばらな風景特徴の乏しい道路環境を想定し、NCLT公開データセットを用いた検証実験を行った。点検時に得られる位置情報(GPS等)の誤差を想定し、点検3Dデータの初期位置にノイズ(位置ノイズ:0~10m、回転ノイズ:-50°~50°)を与え、本技術によって参照3Dデータに正確に重ね合わせることができるか、100回の繰り返し検証を行った。
100回試行の結果、位置誤差の中央値0.11m、回転誤差の中央値1.28°で、参照3Dデータに重ね合わせできることを確認した。これにより、点検3Dデータ全体に高精度な位置情報が紐づくことから、点検3Dデータ作成に用いた一連の画像内のインフラ設備の位置が特定可能になる。
今後は国内道路シーン等での検証を進め、NTTグループで展開を進めるドライブレコーダを用いた点検・デジタル台帳作成ソリューションでの実用化をめざす。これにより、社会インフラの共通課題である維持管理の稼働・コスト削減に貢献する。
また、本技術を用いて街全体を3D管理することで、官公庁が推進する3D都市モデル等と連携した都市計画や防災対策、自動運転・ドローン航路設計等で必要な高精度3D地図整備へのデータ活用なども可能となり、安心・安全でスマートなまちづくりの実現に貢献する。


