

日立は12月24日、自動車・物流分野の制御ソフトウェアを対象に、制御工学とAI・ソフトウェア工学を融合する「Physical AI」の実現に向けた技術を開発したと発表した。
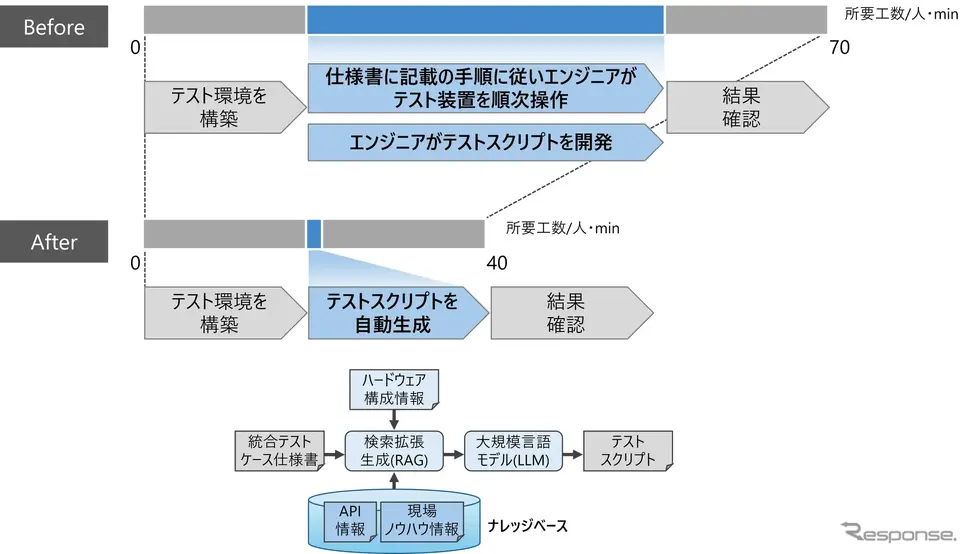
自動車分野では、コントローラ実機固有のAPI情報を生成AIに取り込むことで、従来困難だった実機向けテストスクリプトの自動生成を実現。統合テスト工数を43%削減した。
物流分野では、現場の環境や作業の変動要素を事前に分析し、アーキテクチャ設計に反映することで、自律ロボット制御ソフトウェアの再利用性と現場作業効率を向上させた。
日立とAstemoが共同開発した車載システム向けテスト生成AI技術では、コントローラ実機固有のAPI情報や現場ノウハウを生成AI(大規模言語モデル+検索拡張生成)に取り込む。自然言語で記述されたテストケース仕様から、現場知識を反映した実機向け統合テストスクリプトを自動生成する。
マルチコアECU統合テストに関するパイロットプロジェクトにおいて、手動実行に要する工数と比較して43%の工数削減を実現した。現場ごとのハードウェア構成にも柔軟に対応でき、信頼性の高いAI活用を可能にする。
物流分野では、工場や物流センターなどの現場で発生する製品や環境、作業内容の多様な変動要素を事前に分析し、機能モデルとして整理することで、ソフトウェア上で柔軟に管理できる変動性管理技術を開発した。
ロボット制御ソフトウェアをモジュール化し、ROS上で動作するノードとして実装することで、新商品やピッキング・プレース条件の変更にも迅速に対応できる。現場エンジニアやロボットオペレータへのインタビューや実証実験を通じて、システム設定作業の効率向上を確認した。
これら2件の研究成果は、ソフトウェア工学分野で著名な国際会議ASE 2025(2025年9月採用、11月発表)に同時採用された。
この技術は、制御ソフトウェア開発の効率化と現場作業者の負荷軽減を通じて、持続可能な社会インフラの実現に貢献する。日立は今後も、制御工学とAIとソフトウェア工学を融合した「Physical AI」の実現に向けた技術を、自動車・物流分野をはじめとするさまざまな社会インフラへ展開していく。


