


ルネサス エレクトロニクスは6月3日、先進運転支援システム(ADAS)や自動運転システムの開発向けに、車載用SoC(System on Chip)「R-Car V3H」に搭載した画像処理等のハードウェアアクセラレータをすぐに活用できる「認識用クイックスタートソフトウェア」を、北米より順次、提供開始すると発表した。
R-Car V3Hは、高性能なコンピュータビジョン処理やAI処理を、低消費電力で実現できるハイエンドな車載用SoC。ADASや自動運転システムでは周囲の物体を素早く認識するため、主要なアルゴリズムを高速で処理する必要がある。R-Car V3Hは、それぞれのアルゴリズムに対して、CNN(Convolution neural network)、高密度オプティカルフロー、ステレオディスパリティ(立体視差)、オブジェクト分類など、専用ハードウェアアクセラレータを搭載することで、高速処理を実現している。
今回の認識用クイックスタートソフトウェアは、こうしたアクセラレータを活用するにあたり、知識や経験が少ない場合でもアプリケーション設計を効率よく開始できるよう開発。記録済みデータからの入力だけでなく、センサから直接信号入力、結果の表示など、あらゆる画像認識ソフトウェア開発のステージに対応する。
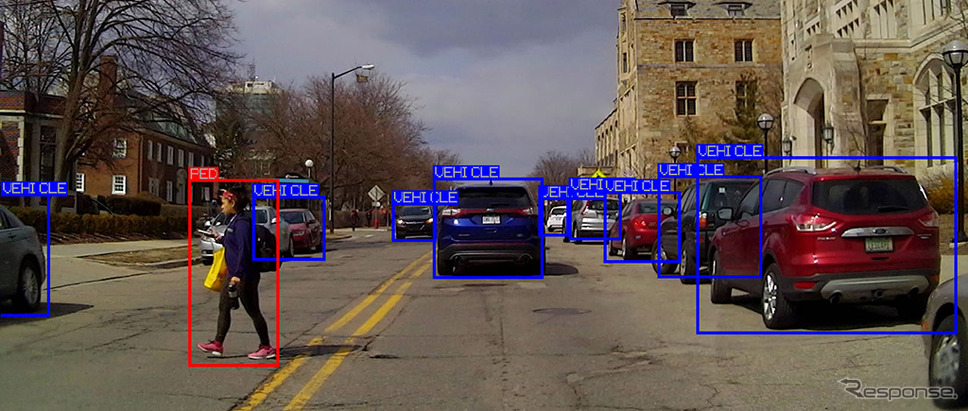
同ソフトウェアは、カメラを用いた障害物検出(COD)、LiDARを用いた障害物検出(LOD)、道路特徴検出(RFD)、これら3つのためのリファレンスソフトウェアで構成。CODリファレンスソフトウェアは、CNNエンジン、コンピュータビジョンエンジン(CVエンジン)、および画像レンダリング(IMR)のIP(Intellectual Property)を使用することで、自動車、トラック、バス、歩行者のような2Dオブジェクトを検出する。LODリファレンスソフトウェアは、CNNエンジンとCVエンジン使って、自動車やトラックなどの3Dオブジェクトを検出。RFDリファレンスソフトウェアは、CNNエンジン、CVエンジン、IMR、および画像認識エンジン(IMP)を使用し、運転可能なフリースペース、車線(車線変更可および不可)、道路境界線、車線や最寄りのオブジェクトまでの距離を特定する。
CODおよびRFDは1秒あたり約30フレームを処理可能。LODは、50メートルの3D範囲を検知する場合、1秒あたり約15フレームを処理できる。


