自動運転研究の世界的権威である米カーネギーメロン大学において、自動運転の実現に取り組む日本人研究者、青木俊介氏が、「サイバー信号機」という概念を発表した。自動運転車両同士が協調して、予期せぬコンフリクトを切り抜けるための技術だ。
サイバー信号機の具体的な仕組みや、これから目指すところについて、青木氏本人に聞いた。
見えない信号機とは
---:「サイバー信号機」とはどのような技術なのでしょうか。
カーネギーメロン大学 計算機工学 専攻 博士候補生 青木俊介氏(以下敬称略):自動運転車両にとっての交差点は、(自動運転用の)地図データの中に情報として記録されていますので、自動運転の車両は地図データにアクセスして、ここに信号があるという前提で、認知・判断しながら走行していきます。
しかし一方で、例えば工事や事故が発生していて道路状況が変わっていたり、あるいは店舗などの駐車場から道路に合流するシーンは、地図データに交差点として登録されているわけではありません。
---:そうですね。
青木:人間同士が運転しているのであれば、お互いアイコンタクトや身振り手振りで、譲ったり譲られたりして走ります。しかし、自動運転の車両が身振り手振りを理解するのは非常に難しいので、そのような意思疎通を、V2V(=車車間通信)を使って実現しようという考え方です。
このように、工事現場や事故などの(特異な)状況を、動的な交差点=ダイナミックインターセクションと名付けて、実際には人間からは見えませんが、サイバー空間で、クルマから見ると信号機があるように見えるという理論と仕組みを提案しているものです。
---:なるほど。そうすると、クルマ同士が意思疎通するために、共通のプロトコルを持っている必要がありますね。
青木:そうです。V2Vで交通を制御する領域は、デバイスの仕組みや使うメッセージのタイプなど、各国の研究者や大学、産業界が標準化に向けてまさに動いている状況です。
---:V2Vの通信手段はセルラーV2XやDSRCがありますが、どう考えていますか。
青木:今のところ我々はDSRCを考えていますが、この技術そのものは、ピアツーピアの通信ができれば、通信手段に関わらず転用は可能です。
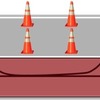
---:動画を拝見すると、自動運転の車両が目の前の赤いコーンを発見して停止する。しかし自分の車線が埋まっているので動けない。そこで、V2Vで対向車線の車両と連絡を取り合って迂回路を確保し、その場を通過する、という様子が見られます。
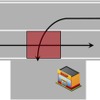
青木:はい。自動運転の車両はまず、センサーで障害物を検知して停止します。そして、パスプラニング(経路計画)と言って、自分が採るべき経路を探索します。
工事現場のエリアが分かれば、どのような迂回路を作ればいいかが計算できますが、それを地図データと照らし合わせると、ここは衝突の危険があるな、ということが予想できるわけです。そこで、「この経路を通りたい」という迂回路の情報を無線で送り、周りのクルマからOKを受け取ることで通過できるようになる、というものです。
---:クルマ同士でコミュニケーションするということですね。
青木:そうです。いまの工事現場では誘導員が交通整理をしていますが、クルマ同士がV2Vでつながっていれば、そういうことをする必要はありませんし、安全に迂回することができます。
---:この“ダイナミックな交差点”は、V2Vでつながっているクルマ同士であれば、意思疎通して共通認識が得られると思いますが、人間が運転するクルマとはどうやって共通認識を持つんですか。
青木:現段階では、ほとんどが自動運転の車両で、クルマ同士がV2Vでつながっている環境を想定して研究しています。もちろん、今後社会に実装していくにあたっては、人間が運転するクルマや、歩行者などもいる環境に対して、どのように実装していくか考えていくことが必要です。
ただ、研究や実証実験において機械側を信用しすぎるのは危険なので、最初の段階では機械側を人間に適用させる、今の人間のルールに合わせて機械を設計していくということが必要だと思います。
V2Vの公道実験の難しさ
---:この研究は、シミュレーターでの動作実験に成功し、次にニューヨーク州立大学のキャンバス内で実際にクルマを用いて実験をした、という段階ですが、今後は公道で実験をしていくことになるのでしょうか。
青木:V2Vの実証実験を公道で行うのはまだ厳しいと思っています。実際に公道でV2Vが利用できるかというと、まだそういう段階ではないと考えています。
---:それは、V2Vに対応したクルマがまだまだ少ない、ということですか。
青木:そうですね。我々はGMと組んで研究を進めており、V2V機能を搭載しているキャデラック『CTS』でテストをしているのですが、街中で他のCTSにそう頻繁に出会うわけではありません。
ただ一つ言えるのは、シミュレーションの中で自動車を走らせているプログラムは、実際の車両で使えるように設計しているので、そこにはかなり信用を置いています。
---:そのシミュレーターは、人が運転するクルマや、バイクなども含めた環境を再現するシミュレーターなのですか。
青木:はい、そのように作っています。シミュレーター自体も我々のグループで開発しているので。
イレギュラーな瞬間をルール化する意義とは
---:今回のこの研究成果によって、どのような課題を解決できると考えていますか。
青木:V2Xのアプリケーションは今いろいろな場面で研究されていて、魔法の技術のようにもてはやされていますが、我々はそこに対して、ひとつの具体的なアプリケーションを提案できたのではないかと考えています。
交差点の信号機を置き換えることであったり、身振り手振りができない状況でどのように交通を整理するのか、どのように複数の自動運転の車両が協調して、交差点という障害を乗り越えていくのか、ということです。
---:社会における具体的な利用シーンはどのようなものがありますか。
青木:工事や事故以外にも、道路わきの駐車場からクルマが合流するところや、反対車線のお店に入る、という時も一種のダイナミックな交差点です。
---:通常の交通の流れからすると、ちょっとイレギュラーなシーンですね。人間のドライバーはそれを普通のこととして処理していますが…
青木:そういったシーンに対して、機械のためのルールを作ってあげたというのが今回の仕事です。機械学習だけですべて解決できるわけではありませんので。
---:なるほど。そういったシーンをルール化していくということですね。
青木:その通りです。ルール化してあげると機械は簡単に処理ができるので。人間がなんとなく対応できていることをルール化していくことは、自動運転を社会に出していくための重要なポイントなのかなと思っています。